
Steps and Edges
The boundaries of features and structural details in an image are usually defined by changes in brightness or color. Locating these edges so that they can be accurately measured has been an active area of development in image processing. In addition, there is considerable evidence that the steps and edges are key components of a scene selected by human visual processes, and that either extracting them from an image (forming a �sketch� of the scene) or sharpening their appearance assists viewers.
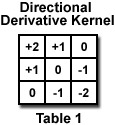
The Laplacian sharpening or unsharp mask filters shown above increase the contrast at steps and edges, but are also sensitive to noise. These operations are mathematically a second derivative of brightness. A first derivative of brightness can be calculated with a kernel such as the one in Table 1 that calculates the difference between neighbors at the upper left and lower right. Because it can produce either positive or negative results, an offset value of 128 (medium gray) is added to the result for display. Eight similar kernels can be formed by rotating the values in 45 degree steps to calculate the derivative in various directions, as shown in the Directional Derivatives interactive tutorial.
| Interactive Tutorial | |||||||||||
|
|||||||||||
The derivative operation is often called an embossing filter because of the appearance it creates. In the example, the RGB color channels are processed individually. Steps and edges oriented perpendicular to the direction of the derivative are enhanced, but those parallel to it disappear.
If the directional derivative is thought of as a vector, two perpendicular derivatives can be combined to calculate the magnitude of the brightness gradient independent of its orientation. This is the widely used Sobel gradient operator, which applies the kernel in the vertical and horizontal directions to each pixel using brightness rather than color values, and then takes the square root of the squares of the magnitude of the two results to form a new image. In the Sobel Gradient Operator interactive tutorial, the process is applied to the brightness values only.
| Interactive Tutorial | |||||||||||
|
|||||||||||
There are many other functions that may be used to mark steps and edges. For example, the statistical standard deviation or variance of the pixels in a small neighborhood rises abruptly at boundaries. For a color image, the range, or maximum vector difference between any pair of neighbor pixels, is often useful. The Statistical Filters interactive tutorial illustrates these techniques.
| Interactive Tutorial | |||||||||||
|
|||||||||||
A different approach to enhancing the visibility of steps and making their location more precise operates by transforming gradual changes in brightness that extend over several pixels into an abrupt change. A useful analogy is the buttes and mesas in the American southwest, which rise with sheer walls from the desert floor. Erosion causes these walls to slump. In the same way, the finite size of pixels in the camera averages brightness values from both sides of a step, producing an intermediate value. Reversing this effect can restore the step sharpness as shown in the Kuwahara Filter interactive tutorial. Called a maximum likelihood technique, this procedure compares the statistical properties of neighborhoods around each pixel and assigns to the pixel the average value of the neighborhood that it is most like.
| Interactive Tutorial | |||||||||||
|
|||||||||||
Contributing Authors
John C. Russ - Materials Science and Engineering Dept., North Carolina State University, Raleigh, North Carolina, 27695.
Matthew Parry-Hill and Michael W. Davidson - National High Magnetic Field Laboratory, 1800 East Paul Dirac Dr., The Florida State University, Tallahassee, Florida, 32310.
BACK TO INTRODUCTION TO DIGITAL IMAGE PROCESSING AND ANALYSIS
BACK TO MICROSCOPY PRIMER HOME